Anwendung von rastmomentfreien Motoren in der Halbleitertechnik: Luftgelagerte Rundtische / Drehtische
Luftgelagerte Drehtische werden für Anwendungen eingesetzt, die eine höchste Präzision erfordern, mehr als dies bei Drehtischen mit herkömmlichen Kugellagern möglich ist. Typische Zielbranchen hierfür sind die Fertigung von Halbleiter- und Messtechnik. Neben dem Luftlager selbst sind auch sehr präzise bearbeitete mechanische Komponenten des Antriebs- und Bearbeitungssystems erforderlich. Darüber hinaus sind ein hochaufgelöstes Winkelmesssystem, und eine passende Antriebselektronik erforderlich. Vor allem ist die Verwendung eines rastmomentfreien Motors notwendig, damit das vom Motor gelieferte Drehmoment möglichst wenig Momentenwelligkeit aufweist.
Das Luftlager selbst muss die folgenden Eigenschaften aufweisen:
- ein minimaler Kippfehler, d. h. die Abweichung von einer idealen vertikalen Drehachse zur Längsachse des Lagers
- eine hohe axiale und radiale Genauigkeit, um keine bis minimale Bewegung der rotierenden Teile parallel und rechtwinklig zur idealen vertikalen Drehachse gewährleisten zu können
Diese Parameter des Luftlagers sind nicht mit den Plan- und Rundlaufabweichungen zu verwechseln, welche aufgrund von Bearbeitungsabweichungen der rotierenden mechanischen Teile entstehen. Noch dazu ist die Verwendung eines hochauflösenden optischen Encoders (siehe Link) und des richtigen Steuerungssystems notwendig, um die Gleichmäßigkeit der rotierenden Bewegung zu maximieren.
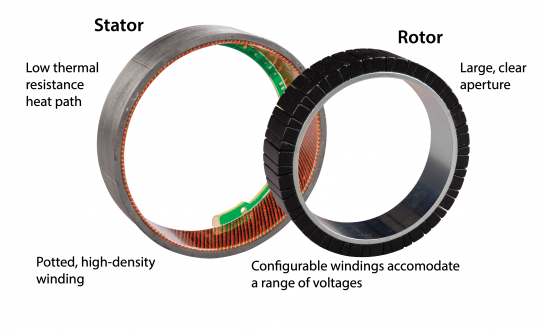
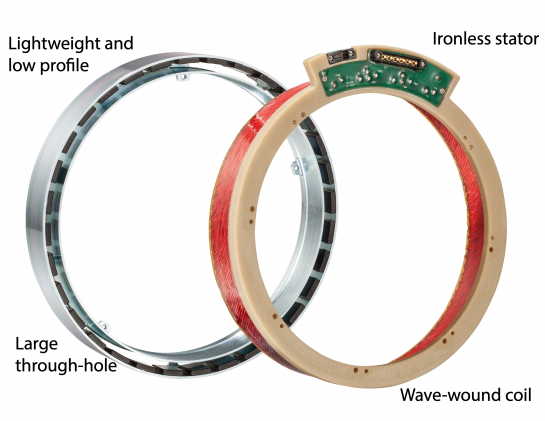
Und nicht zuletzt ist die Verwendung eines rastmomentfreien Motors zwingend erforderlich, wie die oben aufgeführte TG-Familie oder LSI-Familie. Beide Motorbaureihen werden als nutenlose Variante ausgeführt, d.h. es sind keine Statorzähne vorhanden, sondern lediglich eine Luftspaltwicklung. Das bedeutet, dass die Reluktanz des Motors in Bezug auf die Winkelposition des Rotors konstant ist, so dass während des Betriebs kein Rastmoment auftritt. Dies wird kombiniert mit einer guten Phasensymmetrie, d.h. einem elektrischer Fehler von ~1°, und einer Gegen-EMK-Gesamtverzerrung von < 1 %, typischerweise 0,25 %. Das bedeutet, dass ein typischer Motorbausatz aus dieser Serie in Verbindung mit einem passenden Motor-Controller (z.B. MACCON LWM7), der eine perfekte Sinuswelle erzeugen kann, eine Drehmomentwelligkeit von nahezu null aufweist, was zu einer unvergleichlichen Laufruhe führt.


")
")


")
 wird gezeigt, neben den für eine gelagerte Variante nötigen mechanischen Komponenten.")



")

